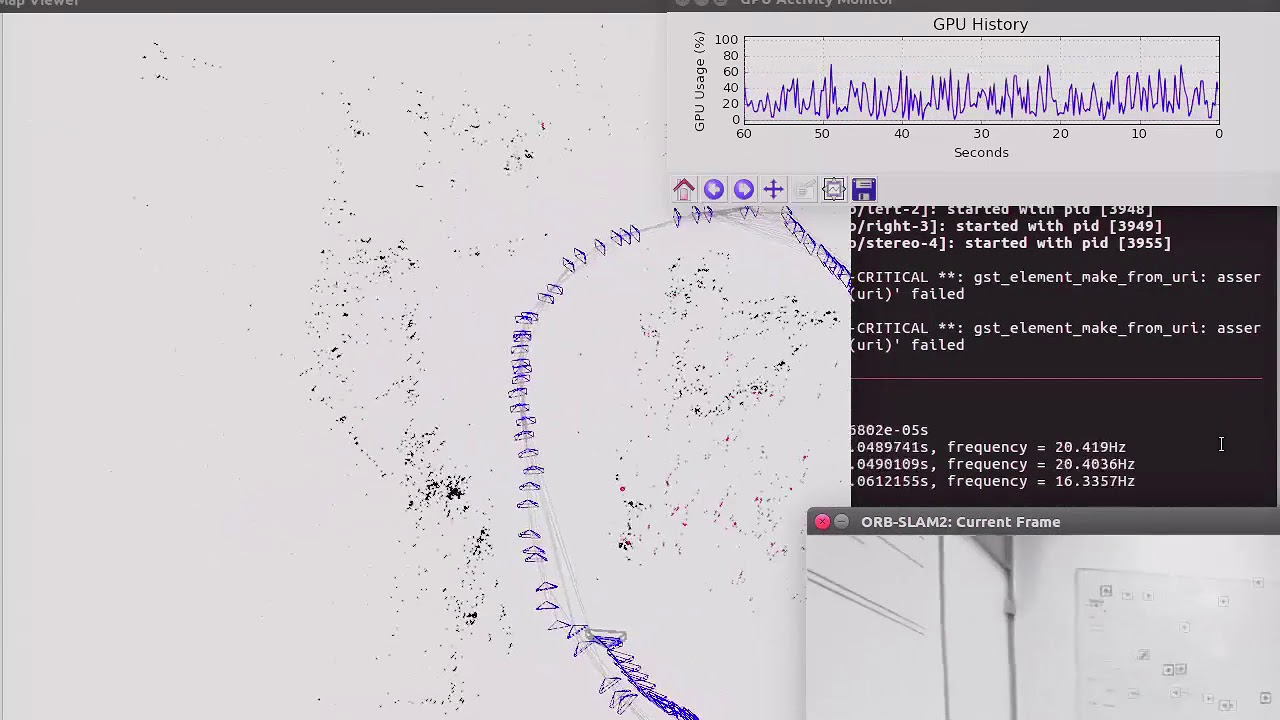
Simultaneous localization and mapping (SLAM) is the computational problem of constructing a map of an environment while simultaneously keeping track of the robots location within it. We tested different 3D-sensors and SLAM algorithms combined with our NVIDIA Jetson board and reviewed the stability and performance. The shown case is based on ORB-SLAM2 with GPU enhancement modified and added ROS topic publisher for NVIDIA Jetson TX1. Tested with Monocular camera in real time. A great solution!