
Eye contact is one of the most important means of communication. We want to be seen. And we want to see when others look at us.
Therefore, it is essential for a social robot to have the ability to make eye contact. Unfortunately, two eyes shown on a flat display cannot give the real impression of eye contact. The phenomenon is known as the Mona Lisa effect: if eyes in a portrait look at the viewer, they do so regardless of the angle from which the portrait is viewed. Somehow there is always eye contact, but never really. For this reason, a few robots use real eyeballs that are moved in a mechanically complex way.
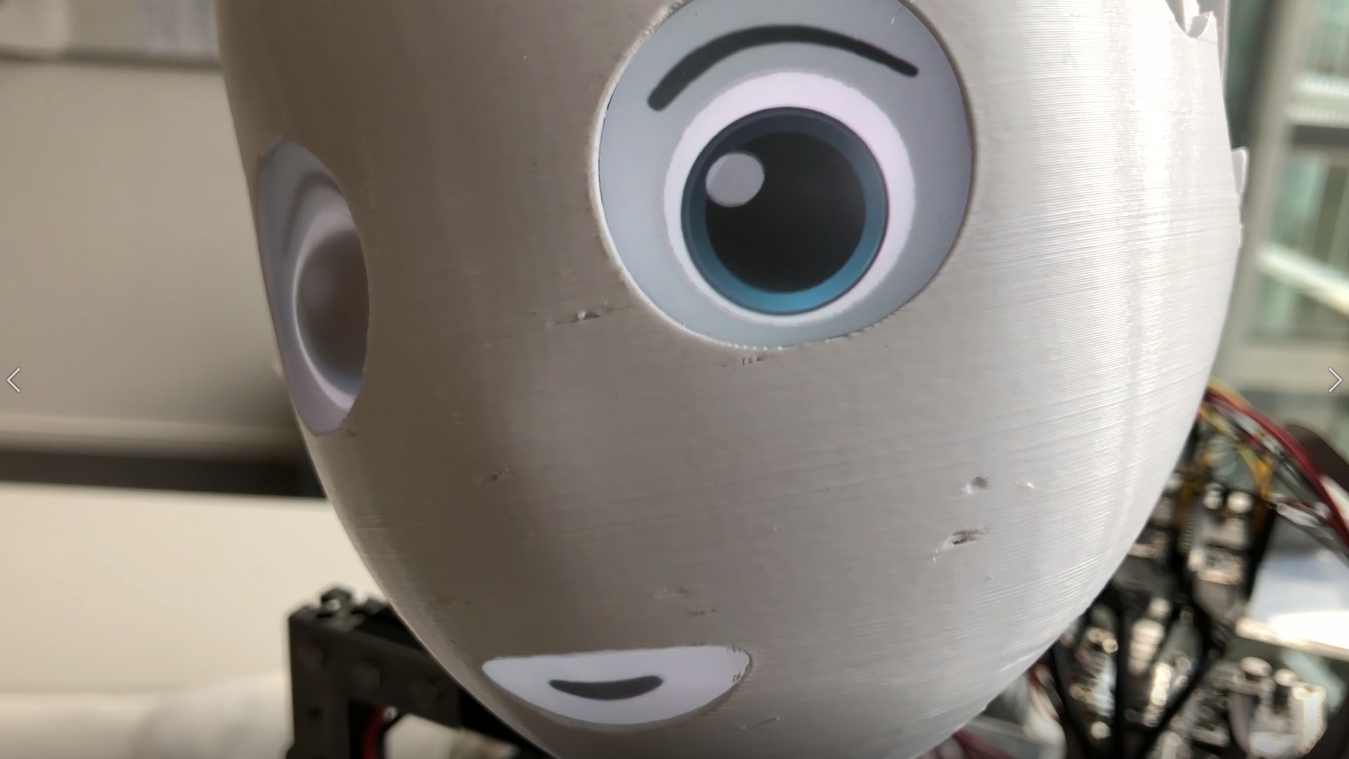
However, we have found another more robust and cheaper solution. We use fiber-optic faceplates on OLED displays, into which a 3D surface is milled. This way, the iris actually moves on the milled 3D sphere surface and a realistic impression of eye contact is created.
In addition, we have the option of also animating the eyelids and brows via the displays in order to also create expressive facial expressions for non-verbal communication.
In the video shown, we first recorded my own facial expressions and head movements via the computer vision component and then simply played them back on our robot head prototype.