
Our robot learns to understand space.
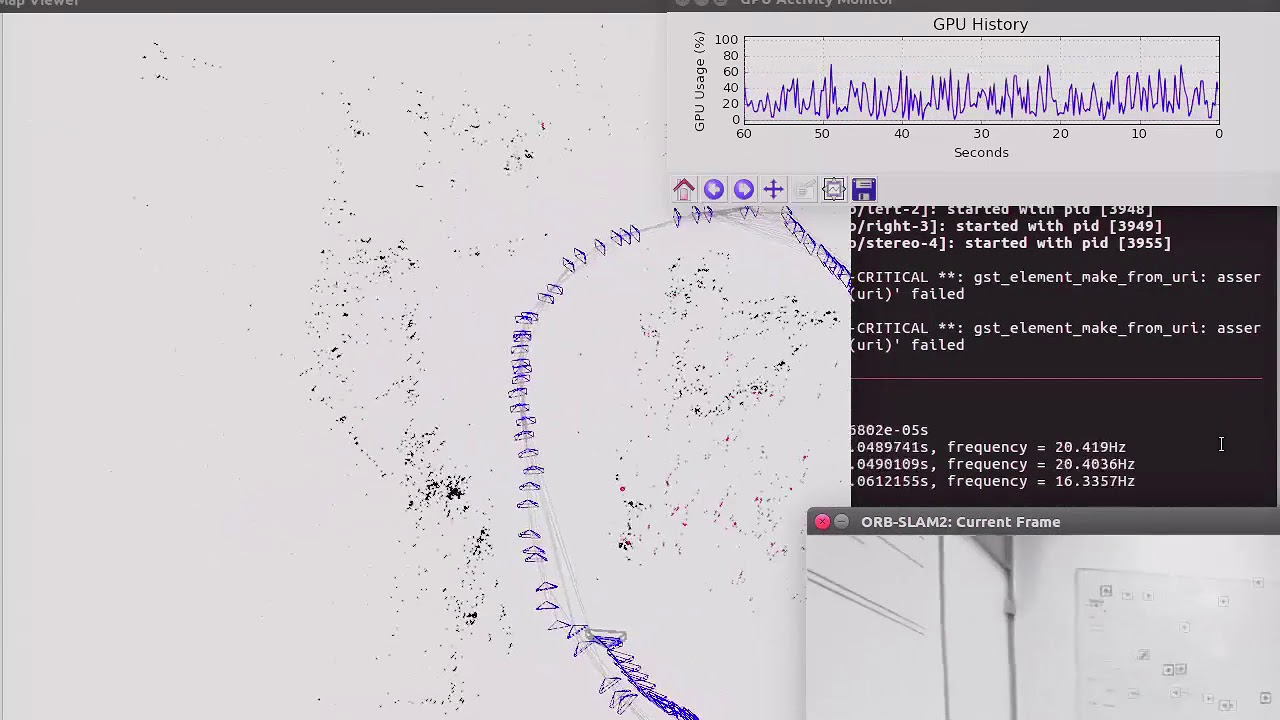
https://nextcloud.navelrobotics.com/index.php/s/d5f3yz8pkeNE8nr/download Simultaneous localization and mapping (SLAM) is the computational problem of constructing a map of an environment while simultaneously keeping track of the robots location within it. We tested different 3D-sensors and SLAM algorithms combined with our NVIDIA Jetson board and reviewed the stability and performance. The shown case is based on ORB-SLAM2 with GPU … Read more