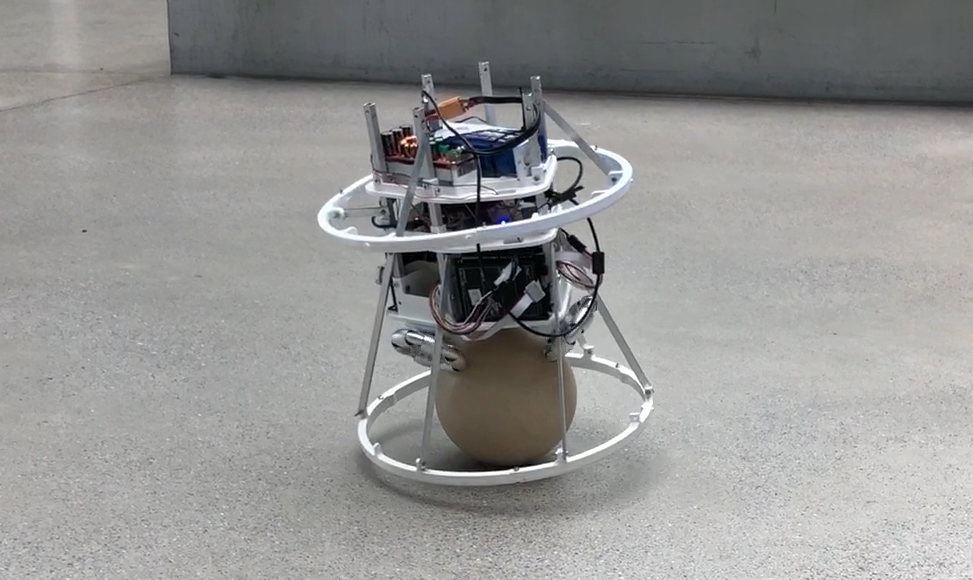
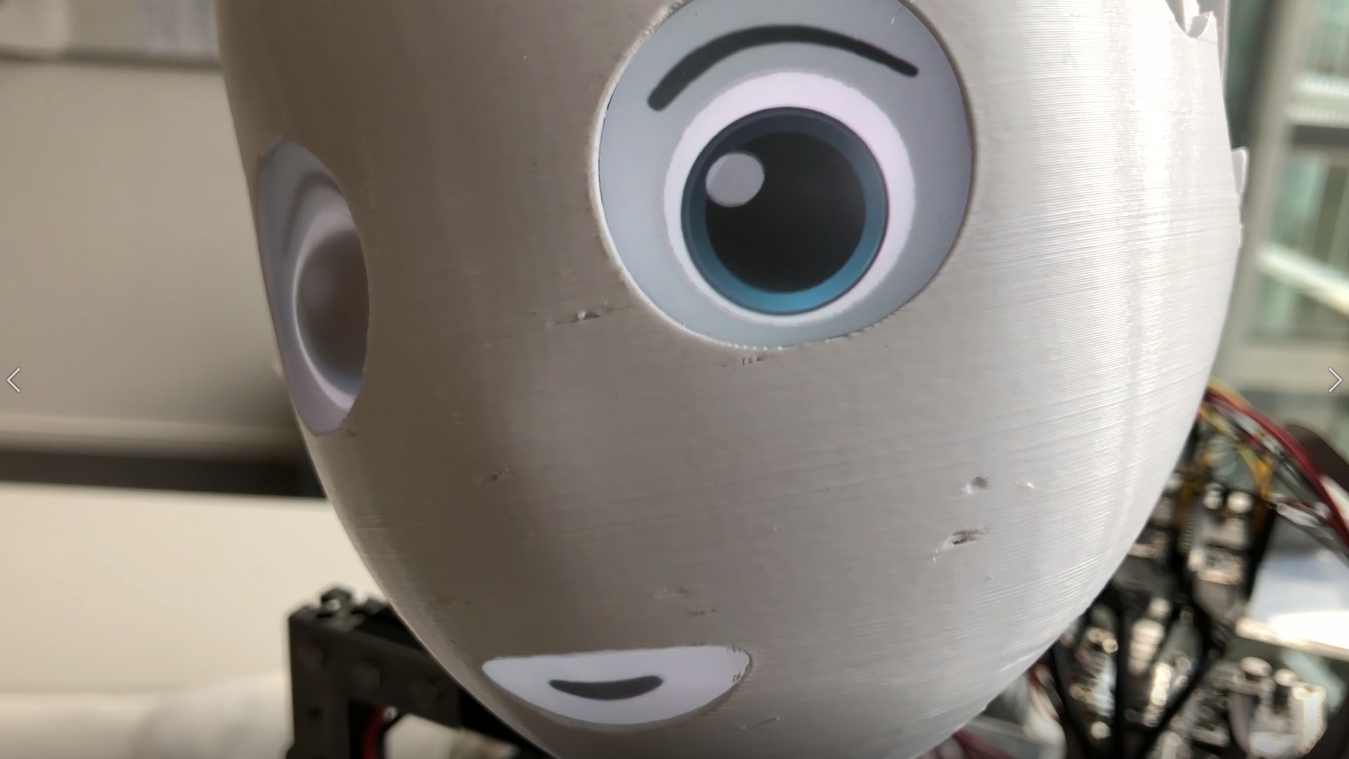
verbal and nonverbal dialog with our head
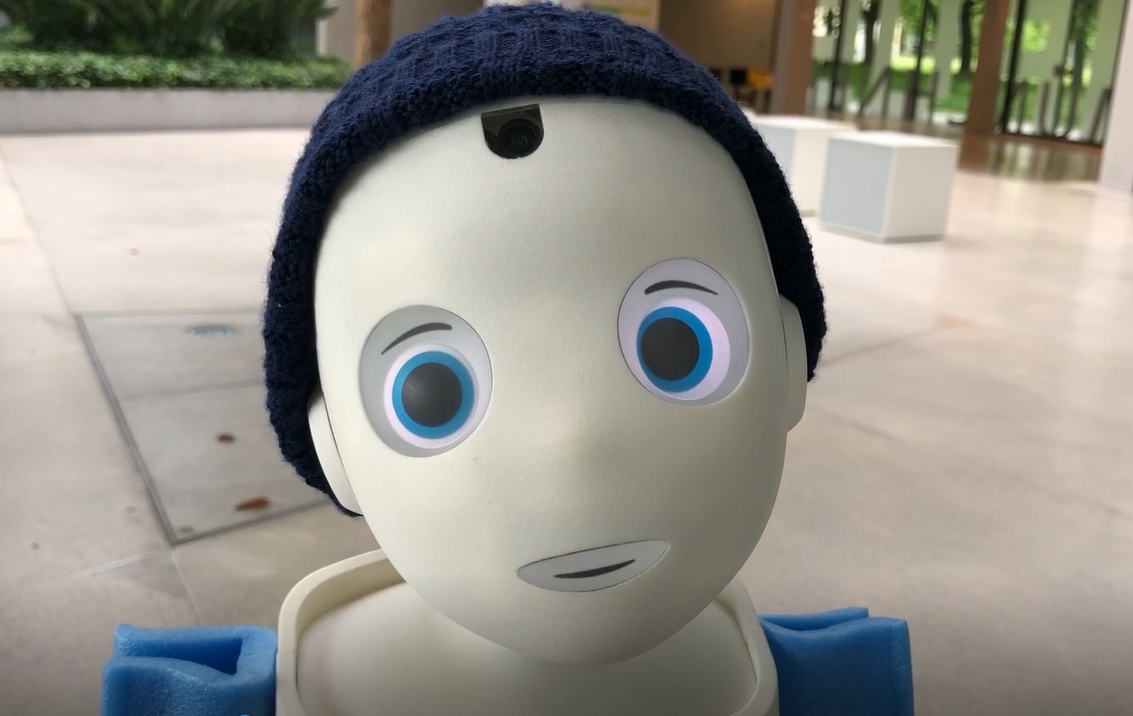
https://nextcloud.navelrobotics.com/index.php/s/BiHqWbRGJbq48cq/download Gradually, we are getting closer and our head is becoming interactive.For social interactions and thus for social robots, verbal and nonverbal communication is essential. Therefore, we have put a lot of emphasis on the design of our head. Agile head movements with silent gearless drives and lively facial expressions enable expressive power. The high … Read more